
Zachary Pezzementi :: Research
My research focuses on novel applications of automated sensing to both fully automated and human-cooperative robotic systems. Recent projects work toward modeling, analyzing, and providing guidance for robotic surgery, manipulation, and exploration tasks, using vision and touch sensing. My thesis work focuses on object recognition using array-type tactile force sensors.
Projects
Evaluating the Robustness of Perception AlgorithmsWe develop techniques to test the performance of robotic perception algorithms (specifically person detectors) in the face of challenging image conditions. We simulate a variety of common image perturbations and degradations and introduce two that make use of geometric context (from stereo) for more physically-realistic haze and defocus effects. We show how to measure robustness to these conditions for a variety of state-of-the-art detectors, with large-scale experiments conducted on the NREC-AgPD Dataset (below). |

|
Human Detection and Tracking in AgricultureBuilding on the tractor automation work below, we developed a large-scale datset and benchmark (NREC-AgPD) for evaluating person detection capabilities in off-road environments, specifically focused on agriculture. The dataset includes nearly 100k labeled frames of stereo video with GPS localization. We evaluated several leading person detection approaches and presented one of our own as well. See the NREC project page for details. |

|
Orchard Tractor AutomationWe developed an tractor system for carrying out autonomous operations in orange orchards, capable of carrying out operations such as mowing and spraying under only remote operator supervision. The system is equipped with stereo cameras to detect obstacles in the vehicle's path and additional cameras to provide context to the remote supervisor in case of detections. It has been used for over a thousand kilometers of autonomous operation in a working orchard. See the NREC project page for details. |

|
Manipulating and Perceiving SimultaneouslyThe goal of this project is to develop a system, consisting of a robotic hand equipped with tactile sensors, capable of autonomously exploring an environment and identifying objects that have been encountered before, while manipulating the unknown objects as necessary. The ability to explore an unknown object using solely haptic information requires expansion of the state of the art both in object recognition and in manipulation, in addition to the application of simultaneous localization and mapping techniques to the haptic domain. Our approach focuses first on the adaptation of feature-based object recognition methods from the computer vision domain to haptic object recognition. |
|
Visual Tracking of Articulated ObjectsMany objects encountered in the real world can be described as kinematic chains of parts with roughly uniform appearance characteristics. We developed a GPU-accelerated method for tracking such objects in single- or multi-channel (eg, stereo) video streams in diverse domains. The method consists, in brief, of modeling the appearance of the various object parts, then rendering a 3D model of the target object geometry from each view, and measuring the consistency of the resulting image with an appearance class probability map derived from the video images. It's been demonstrated in both surgical and generic settings. |
|
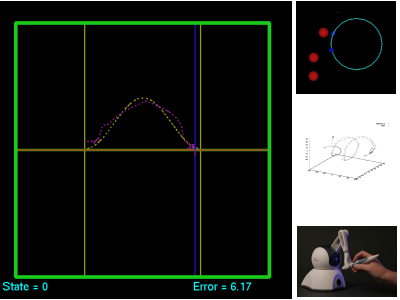
Virtual Fixtures for Human-Machine Cooperative ManipulationWe suggest that dynamics beyond the first order are important in a number of tasks in both open and minimally-invasive surgery. In response, we have designed guidance virtual fixtures which focus not just on the position of the tool, but also its velocity. These fixtures are intended for use in providing guidance to replicate motions, such as those of an expert surgeon demonstrating a procedure to a novice. For more information, see the Human Machine Collaborative Systems overview. |
|
Surgical ModelingWe are interested in modeling and understanding the underlying structures in surgical motions. We would like to eventually use this understanding to create benchmarks for surgical skill evaluation, to develop methods for better surgical training and to automate the documentation of surgeries for libraries. See the Surgical Modeling project website for more details. |

|
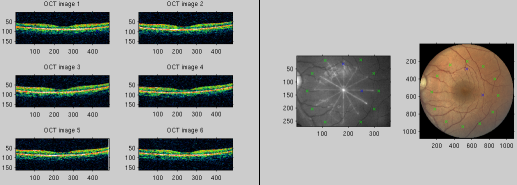
Retinal OCT RegistrationOptical coherance tomography is a non-invasive imaging modality analogous to ultrasound using light rays. Registration of pre-operative OCT images to more familiar intra-operative fundus images allows precise location of pathologies which would otherwise be invisible. |
|
Peer-Reviewed Publications
The following pertains to all of the IEEE publications below:
© IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.- Zachary Pezzementi, Trenton Tabor, Jonathan K. Chang, Carter Tiernan, William Drozd, Eric Sample, Chris Hazard, Michael Wagner, and Philip Koopman. "Perception Robustness Testing at Different Levels of Generality". In Field Robotics, I, December 2021. pp. 253-286.
- Publisher Page
- Alternate Publisher Page - Zachary Pezzementi*, Trenton Tabor*, Samuel Yim, Jonathan K. Chang, William Drozd, David Guttendorf, Michael Wagner, and Philip Koopman. "Putting Image Manipulations in Context: Robustness Testing for Safe Perception". In IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Philadelphia, PA, August 2018.
- * Equal contribution
- Oral Presentation - Zachary Pezzementi, Carl Wellington, Trenton Tabor, Cason Male, and Scott Miller. "Going against the Grain: Real-Time Classification of Grain Quality". In IEEE ICRA 2018 Workshop on Robotic Vision and Action in Agriculture, Brisbane, Australia, May 2018.
- Associated Patent - Zachary Pezzementi, Trenton Tabor, Peiyun Hu, Jonathan K. Chang, Deva Ramanan, Carl Wellington, Benzun P. Wisely Babu, and Herman Herman. "Comparing Apples and Oranges: Off-Road Pedestrian Detection on the NREC Agricultural Person-Detection Dataset". Journal of Field Robotics (JFR), 2017.
- Publisher Page
- arXiv
- Project Page - Trenton Tabor, Zachary Pezzementi, Carlos Vallespi, and Carl Wellington. "People in the Weeds: Pedestrian Detection Goes Off-road". IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Purdue University, West Lafayette, IN, October 2015.
- Publisher Page
- Project Page - Zachary Pezzementi and Gregory D. Hager. "Tactile Object Recognition and Localization Using Spatially-Varying Appearance". In International Symposium on Robotics Research (ISRR), Flagstaff, AZ, August 2011.
- Zachary Pezzementi, Erion Plaku, Caitlin Reyda, and Gregory D. Hager. "Tactile Object Recognition From Appearance Information". In IEEE Transactions on Robotics, Special Issue on Robotic Sense of Touch, 27:3, June 2011. pp. 473-487.
- Publisher Page - Zachary Pezzementi, Caitlin Reyda, and Gregory D. Hager. "Object mapping, recognition, and localization from tactile geometry". In IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, May 2011. pp. 5942-5948.
- Publisher Page - Zachary Pezzementi, Erica Jantho, Lucas Estrade, Gregory Hager. "Characterization and Simulation of Tactile Sensors". In Haptics Symposium, Waltham, MA, March 2010. pp. 199-205.
- Poster -- Finalist for Best Poster Award
- Publisher Page - James C. Gwilliam, Zachary Pezzementi, Erica Jantho, Allison M. Okamura, Steven Hsiao. "Human vs. Robotic Tactile Sensing: Detecting Lumps in Soft Tissue". In Haptics Symposium, Waltham, MA, March 2010. pp. 21-28.
- Oral Presentation
- Publisher Page - Zachary Pezzementi, Sandrine Voros, and Gregory D. Hager. "Articulated Object Tracking by Rendering Consistent Appearance Parts". In IEEE International Conference on Robotics and Automation (ICRA), Kobe, Japan, May 2009. pp. 3940-3947.
- Oral Presentation (and associated videos)
- Publisher Page - Zachary Pezzementi, Daniel Ursu, Sarthak Misra, Allison Okamura. "Modeling Realistic Tool-Tissue Interactions with Haptic Feedback: A Learning-based Method". In Haptics Symposium, Reno, NE, March 2008. pp. 209-215.
- Oral Presentation (and associated video)
- Publisher Page - Ioana Fleming, Sandrine Voros, Balazs Vagvolgyi, Zach Pezzementi, James Handa, M.D., Russell Taylor, Gregory Hager. "Intraoperative Visualization of Anatomical Targets in Retinal Surgery". In Workshop on Application of Computer Vision (WACV), Copper Mountain, CO, January 2008. pp.1-6.
- Publisher Page - Zachary Pezzementi, Allison Okamura, Gregory D. Hager. "Dynamic Guidance with Pseudoadmittance
Virtual Fixtures". In IEEE International Conference on Robotics and
Automation (ICRA), Rome, Italy, April 2007. pp. 1761-1767.
- Oral Presentation (w/o videos)
- Publisher Page - Geoffrey Hollinger, Zachary Pezzementi, Benjamin Mitchell, Yavor
Georgiev, Anthony Manfredi, and Bruce Maxwell. "Design of a Social Mobile Robot Using
Emotion-Based Decision Mechanisms". In IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS), Beijing, China, Fall 2006. pp.
3093-3098.
- Publisher Page
Theses
- Zachary Pezzementi. "Object recognition using tactile array sensors." PhD thesis, Johns Hopkins University, Department of Computer Science, Baltimore, MD, May 2011.
- Geoffrey Hollinger, Zachary Pezzementi, Alexander Flurie, and Bruce Maxwell. "Design and Construction of an Indoor Robotic Blimp for Urban Search and
Rescue Tasks". Swarthmore College Senior Design Thesis, Spring 2005.
Patents
- S. R. Corban, S. Miller, H. Herman, Z. Pezzementi, T. Tabor, J. Chang. "Grain quality control system and method". US Patent US11197417 B2, issued Dec 14, 2021.
- T. Loukili, J. M. Hageman, Z. A. Pezzementi. "System for evaluating agricultural material". US Patent 10188036 B2, issued Jan 29, 2019.
- C. K. Wellington, A. J. Bruns, V. S. Sierra, J. J. Phelan, J. M. Hageman, C. Dima, H. Boesch, H. Herman, Z. A. Pezzementi, C. R. Male, J. Campoy, C. Vallespi-Gonzalez. "Grain quality monitoring". US Patent US9779330 B2, issued Oct 3, 2017.
- R. H. Taylor, S. D. Billings, P. L. Gehlbach, G. D. Hager, J. T. Handa, J. U. Kang, B. Vagvolgyi, R. Sznitman, Z. Pezzementi. "Programmable multispectral illumination system for surgery and visualization of light-sensitive tissues". US Patent US9320428 B2, issued Apr 26, 2016.
Code
The following code was developed over the course of my Ph.D. research and seemed potentially useful to a wider audience, so I've released it under GPL-v3. Please refer to the documentation of each for detailed info.
- MAPS-TFSS - Tactile Force Sensor Simulator
Library Page | Documentation | Download - MAPS-PF - Generic particle filtering classes
Documentation | Download

![]()
This page first went online January 2007. Last updated 11/30/17. Copyright Zachary Pezzementi