Prototype particle filter for 1D translation. More...
#include <ParticleFilter1D.hpp>

Public Types | |
| typedef ParticleFilter1DBase::ParticleType | Particle1D |
| Type of Particle used by ParticleFilter1D. | |
Public Member Functions | |
| ParticleFilter1D (unsigned nParticles) | |
Construct with nParticles particles. | |
| double | getMean () const |
| Get estimate of mean of prior distribution. | |
| double | getWeightedMean () const |
| Get estimate of mean of posterior distribution. | |
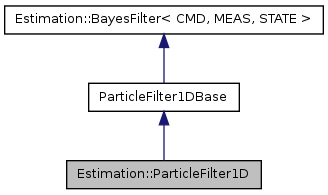
Detailed Description
Prototype particle filter for 1D translation.
Tracks the position of a target in a one-dimensional space, representing state, commands, and measurements all as doubles.
Definition at line 133 of file ParticleFilter1D.hpp.
Member Typedef Documentation
Type of Particle used by ParticleFilter1D.
Definition at line 137 of file ParticleFilter1D.hpp.
Constructor & Destructor Documentation
| Estimation::ParticleFilter1D::ParticleFilter1D | ( | unsigned | nParticles | ) | [inline] |
Construct with nParticles particles.
Definition at line 144 of file ParticleFilter1D.hpp.
Member Function Documentation
| double Estimation::ParticleFilter1D::getMean | ( | ) | const [inline] |
Get estimate of mean of prior distribution.
Returns the mean state of the current population of particles.
Definition at line 156 of file ParticleFilter1D.hpp.
| double Estimation::ParticleFilter1D::getWeightedMean | ( | ) | const [inline] |
Get estimate of mean of posterior distribution.
Returns the mean state of the current population of particles, weighted by their likelihoods under the most recent measurement.
Definition at line 175 of file ParticleFilter1D.hpp.
The documentation for this class was generated from the following file:
- example/ParticleFilter1D.hpp
