Abstract base class for Bayes filter implementations. More...
#include <BayesFilter.hpp>
Public Member Functions | |
| void | update (const CMD &c, const MEAS &m) |
| Perform one step of estimation w/ a command and measurement. | |
| virtual void | CommandUpdate (const CMD &c)=0 |
| Update function for command process. | |
| virtual void | MeasurementUpdate (const MEAS &m)=0 |
| Update function for measurement process. | |
| virtual STATE | getCurrentEstimate () const =0 |
| Returns the current state estimate. | |
Detailed Description
template<typename CMD, typename MEAS, typename STATE>
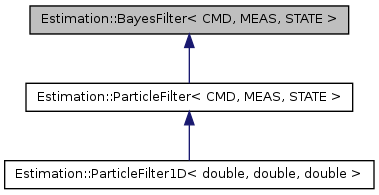
class Estimation::BayesFilter< CMD, MEAS, STATE >
Abstract base class for Bayes filter implementations.
Templates on Command and Measurement classes that encapsulate the state update and observation models
Provides bare-bones functionality generalizable to a variety of Bayes filters, e.g. Kalman, information, particle, histogram...
Definition at line 43 of file BayesFilter.hpp.
Member Function Documentation
| virtual void Estimation::BayesFilter< CMD, MEAS, STATE >::CommandUpdate | ( | const CMD & | c | ) | [pure virtual] |
Update function for command process.
Implemented in Estimation::ParticleFilter< CMD, MEAS, STATE >.
| virtual STATE Estimation::BayesFilter< CMD, MEAS, STATE >::getCurrentEstimate | ( | ) | const [pure virtual] |
Returns the current state estimate.
Implemented in Estimation::ParticleFilter< CMD, MEAS, STATE >.
| virtual void Estimation::BayesFilter< CMD, MEAS, STATE >::MeasurementUpdate | ( | const MEAS & | m | ) | [pure virtual] |
Update function for measurement process.
Implemented in Estimation::ParticleFilter< CMD, MEAS, STATE >.
| void Estimation::BayesFilter< CMD, MEAS, STATE >::update | ( | const CMD & | c, | |
| const MEAS & | m | |||
| ) | [inline] |
Perform one step of estimation w/ a command and measurement.
- Parameters:
-
c command m measurement
Updates the current estimate, modeling implementing a command then receiving a measurement.
Definition at line 57 of file BayesFilter.hpp.
The documentation for this class was generated from the following file:
- Estimation/BayesFilters/BayesFilter.hpp
